V Šola za arhitekturno združenje v Londonu delajo na programu Graduate Design na študijah oblikovanja na temo "Behavioural Complexity", zlasti 3D tiskanih in pnevmatskih robotov, ki služijo enemu samemu, zelo specifičnemu namenu ali delujejo po enem samem "preprostem" algoritmu. Na primer, Synergia je koncept za programabilno snov s pnevmatskimi roji robotskih kock, OwO so nekaj podobnega robotskim črvom za javni prostor.

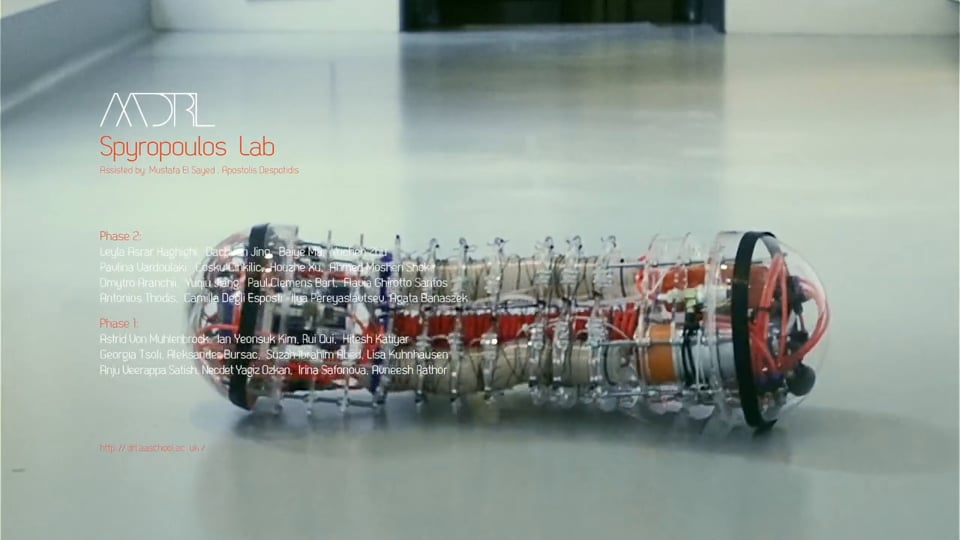
AADRL Spyropoulos Design Lab 2016 (2. faza)
Kreativne aplikacije ima pregled Zaključna dela 2016. Besedila z informacijami je mogoče na pol prezreti, puloverji z dolgimi rokavi imajo vedno veliko pretencioznih dizajnerskih dodatkov, toda samo delo bi lahko dejansko opravili za NASA in njene pnevmatske module Vesoljski habitat Bigelow biti zanimiv.
Sledi delo AADRL Spyropoulos Design Lab, ki raziskuje sisteme oblikovanja, ki temeljijo na vedenju, ki se zavedajo samega sebe, so mobilni in se samostrukturirajo in sestavljajo. Raziskava raziskuje agente z visoko mobilnostjo prebivalstva, ki razvijajo obliko, ki presega končne predstave o vesolju do tiste, ki se razvija in prilagaja. Raziskava se ukvarja z razvojem strategij inteligentnih oblikovalskih enot, ki z organizacijo razvijajo telesne načrte, ki omogočajo pojav novih vedenj. Primer tega je projekt OWO, spodaj, ki je kot posamezna enota zasnovan kot enota, ki z vgrajeno pnevmatiko omogoča enoti, da se razširi / skrči, zvije in zavije. Kar zadeva mobilnost kot posamezna enota, se lahko premika v svojem načinu mobilnosti, toda enota se na primer poveže z dvema enotama, nato pa načrt telesa omogoča konfiguracijo stativa, ki omogoča bitju hojo.
Oblikovalni laboratorij AADRL Spyropoulos
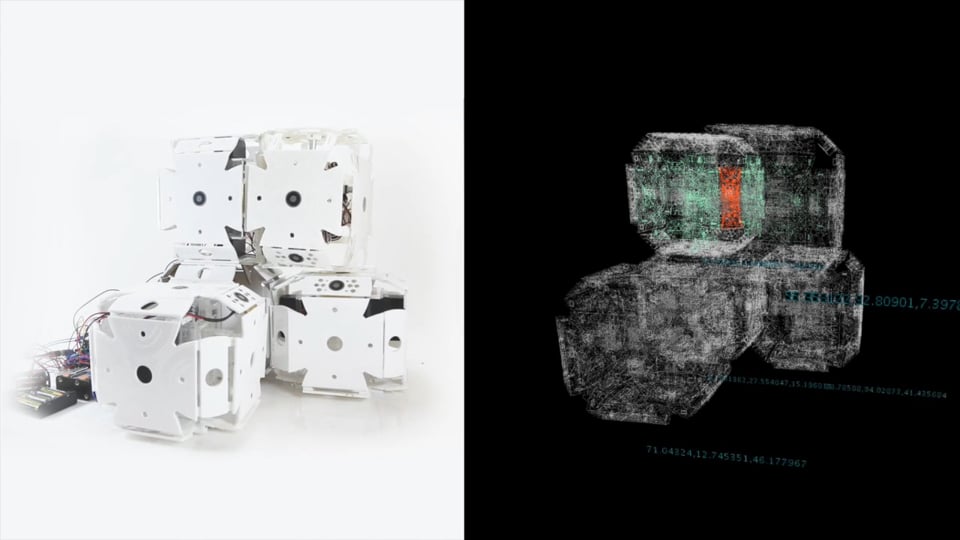
AADRL Spyropoulos_HyperCell
Več za vas:






 "Dravensove zgodbe iz kripte" že več kot 15 let navdušujejo z neokusno mešanico humorja, resnega novinarstva - za aktualne dogodke in neuravnoteženega poročanja v tiskovni politiki - in zombija, okrašenega z veliko umetnosti, zabave in punk rocka. Draven je svoj hobi spremenil v priljubljeno blagovno znamko, ki je ni mogoče uvrstiti.
"Dravensove zgodbe iz kripte" že več kot 15 let navdušujejo z neokusno mešanico humorja, resnega novinarstva - za aktualne dogodke in neuravnoteženega poročanja v tiskovni politiki - in zombija, okrašenega z veliko umetnosti, zabave in punk rocka. Draven je svoj hobi spremenil v priljubljeno blagovno znamko, ki je ni mogoče uvrstiti.
Moj blog ni bil nikoli zasnovan za širjenje novic, kaj šele, da bi postal političen, toda glede na aktualne zadeve si preprosto ne morem pomagati, da ne bi tukaj zajemal informacij, ki so sicer cenzurirane na vseh drugih kanalih. Zavedam se, da se stran za oblikovanje marsikomu ne zdi "resna" v tem pogledu, vendar tega ne bom spreminjal, da bi ugodil "mainstreamu". Kdor je odprt za informacije, ki niso v skladu z državno zakonodajo, vidi vsebino in ne embalaže. V zadnjih 2 letih sem se dovolj trudil, da bi ljudem posredoval informacije, a sem hitro opazil, da nikoli ni pomembno, kako so "zapakirane", temveč kakšen je odnos druge osebe do njih. Nočem nikomur liti med v usta, da bi na kakršen koli način izpolnil pričakovanja, zato bom obdržal ta dizajn, ker upam, da bom na neki točki lahko prenehal s temi političnimi izjavami, ker ni moj cilj nadaljevati tako za vedno ![]() Vsakemu prepuščam, kako se bo s tem spopadel. Vabljeni, da kopirate in distribuirate vsebino, moj blog je bil vedno pod Licenca WTFPL.
Vsakemu prepuščam, kako se bo s tem spopadel. Vabljeni, da kopirate in distribuirate vsebino, moj blog je bil vedno pod Licenca WTFPL.
Težko opišem, kaj pravzaprav počnem tukaj, DravensTales je v preteklih letih postal kulturni blog, glasbeni blog, šok blog, tehnološki blog, grozljiv blog, zabavni blog, blog o najdenih predmetih v spletu, o bizarnem internetu, blogu smeti, umetniškem blogu, grelniku vode, blogu zeitgeist , Odstrani blog in zagrabi torbo. Vse, kar je prav ... - pa vendar ne. Glavni poudarek bloga je sodobna umetnost v najširšem pomenu besede.
Za zagotovitev delovanja strani vabljeni na Donirajte s kreditno kartico, Paypal, Google Pay, Apple Pay ali direktno bremenitvijo/bančnim računom. Najlepša hvala vsem bralcem in podpornikom tega bloga!